

What is kinematics?
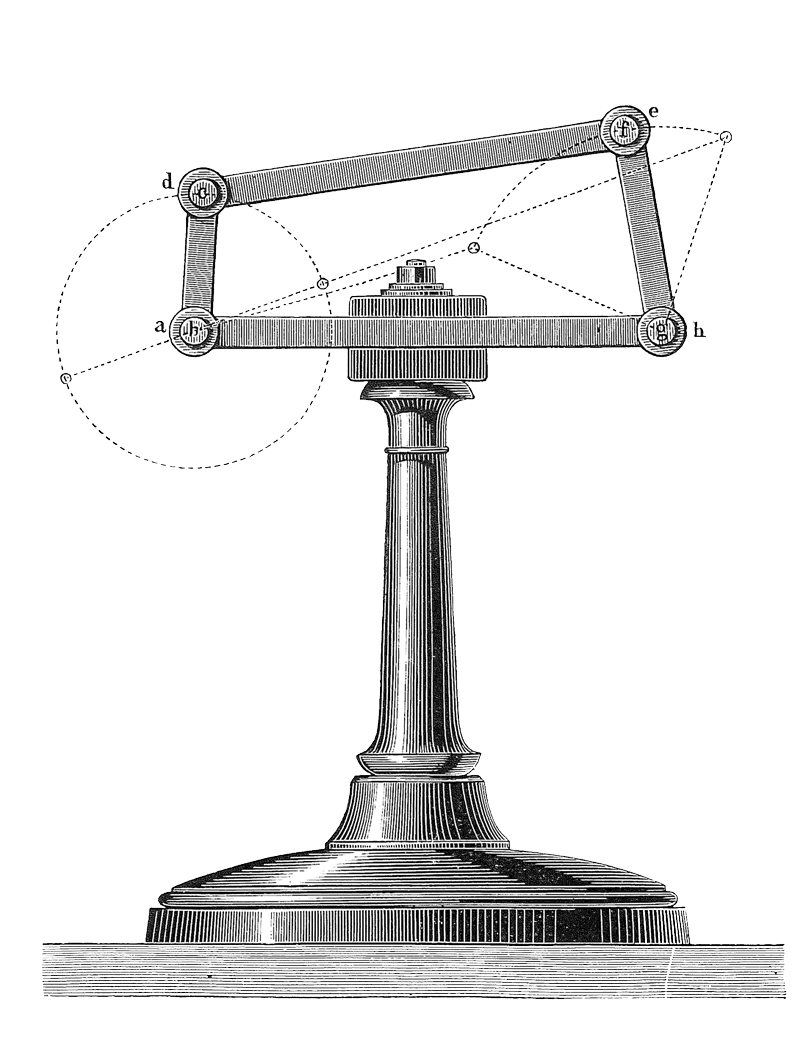
At Reuleaux Models, we create kinematic models developed by Franz Reuleaux to demonstrate concepts of motion.
Kinematics deals with any motion of any objects – the word itself means the study of motion (kinemat means motion in Greek, while ics means study in Latin). This branch of mechanics is concerned with the motion of objects without reference to forces that cause the motion; for example, imagine a car driving down the road. That car can stop, turn, or speed up, but if you want to know more about the how far the car travels, what direction it moves in, how fast it moves, and how quickly it can go from a stop to full speed, you would turn to kinematics.
The concept of kinematics began during the industrial era in the 19th century. Various water- and steam-powered machines were developed, but sharing information about the mechanisms presented a challenge. Water- and steam-powered machines generated circular motions, so the motion needed to be converted into nonsteady linear and curvilinear motion for machine applications, which inventors and mathematicians did by creating kinematic devices.
The birth of modern kinematics
Modern kinematics was born when German engineer Franz Reuleaux set out to improve the process for engineers who needed to approach machine design rationally. He designed more than 800 teaching models and called kinematics “the study of the motion of bodies of every kind … and the study of the geometric representation of motion.” According to the Cornell University Library, Reuleaux “laid the foundation for a systematic study of machines by defining clearly the machine and mechanism, determining the basic mechanical building blocks, and developing a system for classifying known mechanism types.”
Reuleaux’s principles have endured today. His theories were translated into models, 220 of which were acquired in 1882 by Cornell University and are still used today for teaching and research in their engineering department.
Whether you’re an academic, maker, or collector, our team at Reuleaux Models will be happy to design a piece that will suit your needs.

